[ 技術解説 ]
生産性向上に向け進化するロボット
-より速く、より正確に-
久保田 哲也、佐々木 元延、梶原 慎司、前原 毅
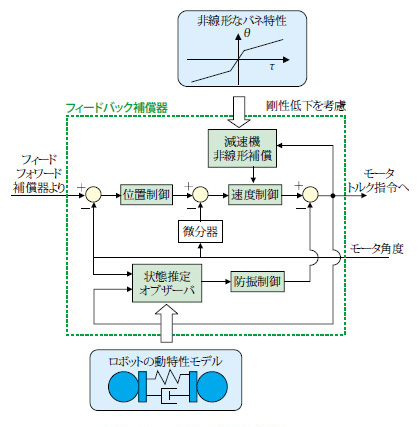
生産性向上のため、「より速く、より正確な」ロボットが求められている。ロボットの高速化・高精度化には、ロボットの力学モデルをベースにした制御が有効である。本稿では、ロボットの性能向上を支える制御技術を解説するとともに、ロボットコントローラの処理能力の向上に伴って導入されている機能について述べる。

![]()
生産性向上のため、「より速く、より正確な」ロボットが求められている。ロボットの高速化・高精度化には、ロボットの力学モデルをベースにした制御が有効である。本稿では、ロボットの性能向上を支える制御技術を解説するとともに、ロボットコントローラの処理能力の向上に伴って導入されている機能について述べる。



