高速・高精度でロボットを動かす
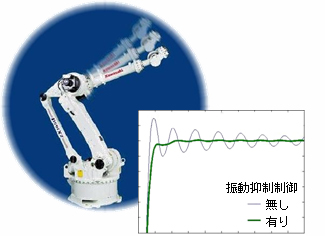
ロボットの減速機などの部品は柔軟な弾性(バネ要素)構造になっています。このため、動作が高速になるつれて、バネ要素の影響により振動が大きくなってしまいます。そこで、動的な特性(ダイナミクス)を考慮し、さらに、たわみを推定する最新の制御理論を応用して、サーボ制御に適用しています。その結果、ロボットの先端位置を振動させずに高速に制御できるようになり、ロボットの性能向上を達成しています。
- 技術開発
- 研究開発活動
- 技術紹介
- 川崎重工技報
- 第187号 大阪・関西万博特集号
- 第186号 パワースポーツ&エンジン特集号
- 第185号 エネルギーソリューション&マリン特集号
- 第184号 DX×ものづくり特集号
- 第183号 グループビジョン2030注力分野特集号
- 第182号 水素サプライチェーン特集号
- 第181号 精密機械特集号
- 第180号 モーターサイクル&エンジン特集号
- 第179号 航空宇宙システム特集号
- 第178号 ロボットシステム特集号
- 第177号 鉄道車両特集号
- 第176号 プラント・環境特集号
- 第175号 技術開発本部 特集号
- 第174号 モーターサイクル&エンジン特集号
- 第173号 分散型発電システム特集号
- 第172号 ロボット特集号
- 研究開発関連ニュース



