用途に応じた最適な機構を生み出す
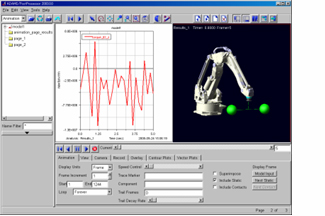
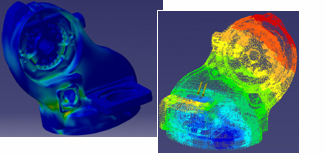
ロボットアームにおいて重要なことは、その使用目的に合致した形状と動作性能です。また、それ以外に、組立てやすさ、メンテナンスしやすさ、コスト、アームにかかる力やその変形量などについても考慮する必要があります。これらの要素には相反するものもあります。例えば、動作性能を良くしようとし過ぎると、コストが高くなり過ぎてしまいます。そこで当社では、構造解析(FEM)や3Dモデルを用いた動作シミュレーションなどの数値解析技術を駆使し、全てを最適にバランスさせたロボットアームを設計しています。
- 技術開発
- 研究開発活動
- 技術紹介
- 川崎重工技報
- 第187号 大阪・関西万博特集号
- 第186号 パワースポーツ&エンジン特集号
- 第185号 エネルギーソリューション&マリン特集号
- 第184号 DX×ものづくり特集号
- 第183号 グループビジョン2030注力分野特集号
- 第182号 水素サプライチェーン特集号
- 第181号 精密機械特集号
- 第180号 モーターサイクル&エンジン特集号
- 第179号 航空宇宙システム特集号
- 第178号 ロボットシステム特集号
- 第177号 鉄道車両特集号
- 第176号 プラント・環境特集号
- 第175号 技術開発本部 特集号
- 第174号 モーターサイクル&エンジン特集号
- 第173号 分散型発電システム特集号
- 第172号 ロボット特集号
- 研究開発関連ニュース



