[ 特許・実用新案紹介 ]
特許 第3577028号 ロボットの協調制御システム
発明者:松本 直之、佐野 正俊、前原 毅、下村 信恭、上野 高廣
-息の合ったロボットたち-
一人ではやりにくいが、二人なら簡単な作業はいくらでもある。たとえば、大きな板を運ぼうとすると、一人ならいっぱいに両腕を広げて両端をつかまなければいけないが、二人だとそれぞれが片方の端を軽く持つだけで運べる。
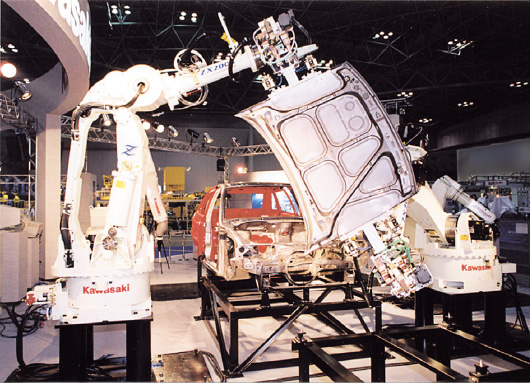
ロボットでも同じで、図1は車のボンネットを左右で別のロボットがつかんで次の工程へ送るデモンストレーションであるが、これを1台のロボットで行うと、つかむための大きなハンドが必要になる。
ロボットはあるときは単独で動き、あるときは協調する。例えば、自動車のフロアパネルの製造ラインで、両側から2台のロボットがそれぞれスポット溶接をする。それが終われば、2台が協調して両側からフロアパネルをつかみ、次の工程へ運ぶことができる。
双方とも普通のロボットであり、どちらもマスターにもスレーブにもなれる。マスター側は相手のとるべき姿勢をイーサネットを経由して指示する。マスター側が動作を遅らせることで通信で遅れる時間差を解消する工夫を行っている。
3台以上の協調動作でも問題なく、とにかく息の合ったロボットたちなのである。