自律型無人潜水機(AUV)
当社は、潜水艦技術を応用し、海中設備の保守・点検を目的とした自律型無人潜水機 (AUV: Autonomous Underwater Vehicle) を開発しております。当社が目指すAUVは水中作業時間の長時間化及び近距離検査作業を可能とするもので、海中設備の保守・点検に要するコストを削減し、今後さらに拡大する海洋開発に寄与します。
プロトタイプAUV
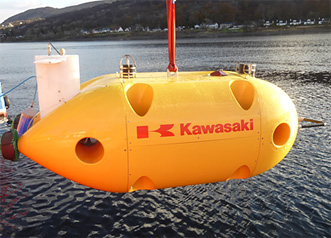
水中作業時間の長時間化に必要な技術(水中ステーションでの自動ドッキング、高速データ通信、非接触充電)を確立するために制作した研究開発用の試作機です。母船と接続した水中ステーションを使って、日本国内及び英国スコットランドの実海域において実証試験に成功しました。
充電や収集した検査データの母船への転送などを海中で行うことにより、水中作業の長時間化を実現することで、洋上におけるAUV揚卸し作業の最少化による船員の負担軽減や安全性の向上、およびメンテナンス作業のコスト低減が期待できます。
| 主要寸法 | 3.3m (L) / 1.4m (W) / 1.2m (H) |
|---|---|
| 空中重量 | 1.5t |
| 最大速力 | 約3ノット |
| 最大潜水深度 | 2,000m |
| 運用時間(充電時間) | 8時間(2時間) |
光通信装置
光通信装置は水中ドッキング時にAUVを水中ステーションまで誘導するために利用しますが、ドッキング後はステーションを通じて母船との高速データ通信にも利用します。
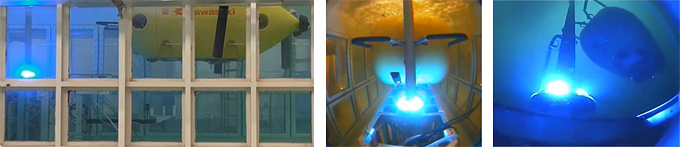
非接触充電装置
水中でのドッキング後は、非接触充電装置を使用することで、AUVを母船に揚収することなく、水中において充電することが可能です。水中ステーションには給電カプラーが、AUVには受電カプラーがそれぞれ装備されております。


パイプライン検査AUV
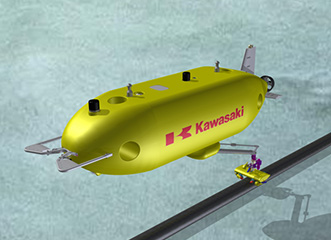
プロトタイプAUVの開発で確立した技術を利用し、2020年の商用化を目指して、海底パイプライン検査用AUV(“SPICE”: Subsea Precise Inspector with Close Eyes)を開発しております。
SPICEには、ヘリオット・ワット大学と共同で研究開発中のパイプライン位置予測の制御アルゴリズムを搭載予定で、これによりパイプラインが地中に埋もれていたり、視認できない状況でも、SPICEがパイプラインを自律で追跡することを可能とします。



