深海底ターミナルの開発プロジェクトを受注
~自律型無人潜水機(AUV)の長時間運用技術を確立~
2019年01月23日
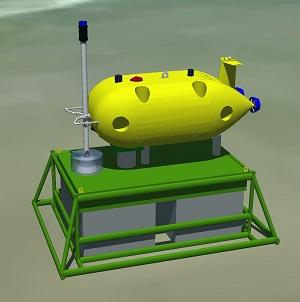
深海底ターミナルとAUVのドッキング(イメージ)
川崎重工は、国立研究開発法人海洋研究開発機構(以下、JAMSTEC)から、自律型無人潜水機(Autonomous Underwater Vehicle:以下、AUV)の長時間運用技術を確立するための開発プロジェクト「深海底ターミナルの設計・製作」を受注しました。
本開発プロジェクトは、日本国政府により進められている、内閣府戦略的イノベーション創造プログラム(SIP)第2期「革新的深海資源調査技術」において発注されるものであり、AUVを長時間調査運用するために、深海底において充電および探査データなどの通信を可能にする深海底ターミナルの開発が目的です。
当社は、この開発プロジェクトの中で、AUVとのインターフェイスを含む全体システムの設計とターミナル実機の設計・製作を行い、陸上および海中にて試験を実施し、2020年3月までにJAMSTECに納入する予定です。
今回、当社が提案した深海底ターミナルのコンセプトや経済性、2017年に日本および英国スコットランドにおける海中試験で実証済のAUV向け自律ドッキング技術や非接触充電技術、水中通信技術等の当社独自開発の技術が評価され、採用に至りました。
当社は本開発プロジェクトを通じて、AUVの長期間運用技術の実用化や品質の向上を図り、AUVから深海底ターミナルまでのトータルシステムを構築するとともに、2020年度を目標に海底パイプライン検査用をはじめとしたAUVおよび関連機器の商用化を目指していきます。
![]()



