カワサキの
高精度ロボット仕上げ技術
ガスタービン部品は、一般の部品に比べて極めて高い精度と安定した品質が求められます。特に、工作機械で加工された部品のシャープエッジ仕上げは、熟練技術者の手作業が欠かせず、自動化は長年困難とされてきました。
そこで当社は、産業用ロボットメーカーとしての強みを活かし、熟練者の繊細な感覚を再現する高精度仕上げ加工技術を開発しました。
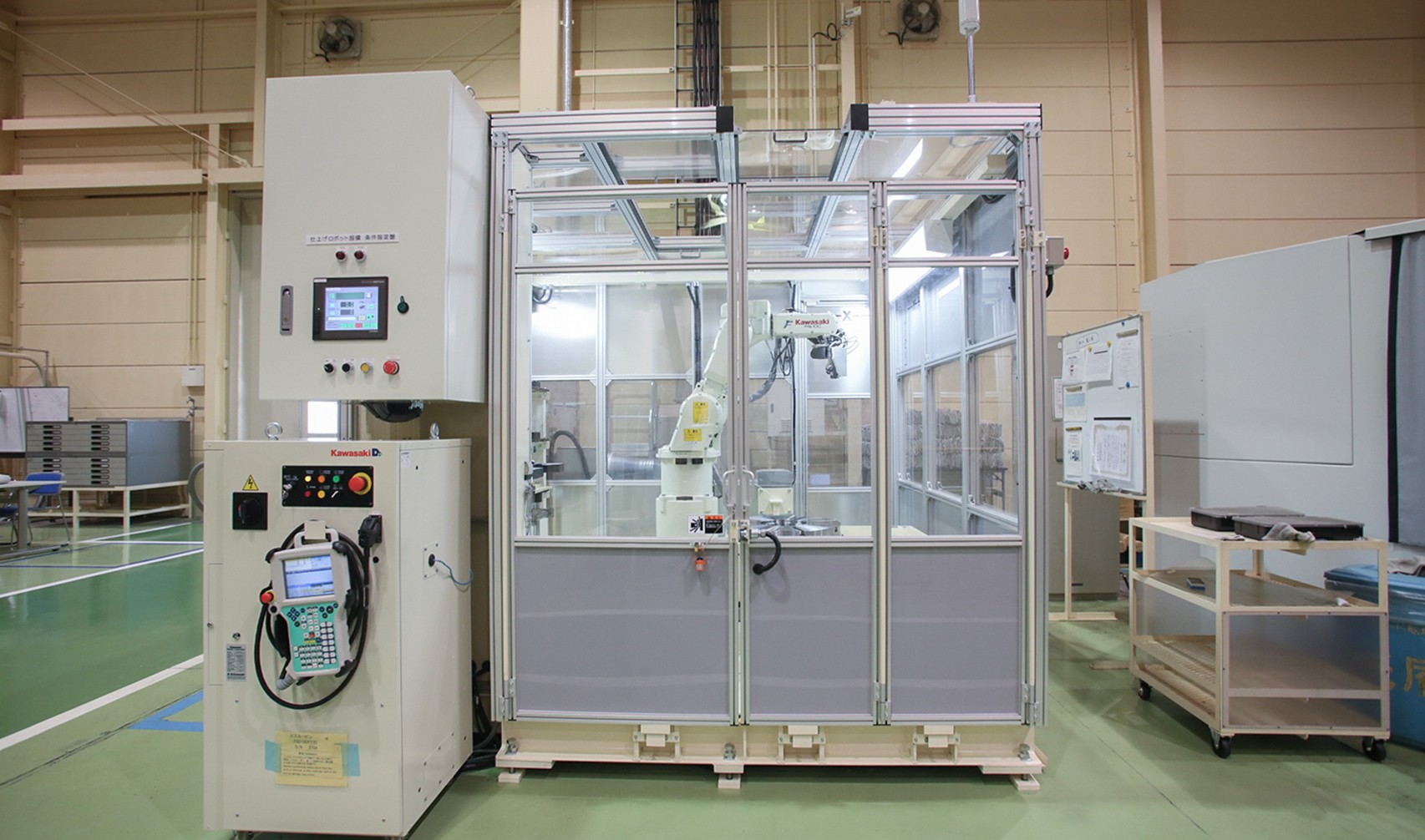
この技術により、ロボットと部品の相対位置を高精度に制御し、多品種の部品にも対応可能な自動仕上げ設備システムを実現しています。6つの独自機能で、職人の手作業に匹敵する精密な加工を可能にしました。

01職人の指先を再現する「定圧装置」
手作業のような繊細さが求められる仕上げ加工をロボットで実現するため、加工工具の押し付け圧に着目し、「定圧装置」と呼ばれる自社開発のフローティングユニットを開発しました。このユニットは、市販品では難しい微小な負荷変動への追従を可能とし、高精度仕上げ分野へのロボット適用を初めて実現しました。
さらに、連続稼働による発熱・熱変位の影響を抑える冷却システムも搭載し、安定した高精度加工を継続的に行えるようにしています。

02位置誤差を正確に補正する「タッチセンシング」
ロボットは繰り返し精度には優れていますが、絶対精度には限界があります。そこで、自社独自のアルゴリズムによるタッチセンシング手法(特許取得)を開発。部品個体差やプローブ交換による誤差をなくし、1/100mm単位での位置補正を実現しました。
03工具径計測と自動交換による「工具管理の自動化」
仕上げ加工では、複数の工具を使い分けると同時に、摩耗管理も不可欠です。そこで、高精度な自動工具交換機能と工具径計測機能を付加し、作業者が設備を停止せずに工具を自動交換できる仕組みを構築しました。摩耗量はロボット制御装置にフィードバックされ、加工位置を自動補正します。
04同時7軸制御を実現する「高精度円テーブル」
円盤形状の部品を精密に回転させながら加工するため、ロボットの第7軸として円テーブル(ポジショナ)を設置しました。工作機械用の高精度テーブルをカワサキロボット向けにカスタマイズし、高精度角度割り出しと同時7軸制御を実現しています。
05高精度センシングを支える「専用治具」
部品とロボット間の位置ズレはタッチセンシングで補正しますが、円テーブルとの芯ズレ補正には高精度治具を使用。翼部品をはじめとするガスタービン部品向け治具製作の豊富な実績を活かし、センシング精度の向上と時間短縮を両立しています。
06レイアウト変更が容易な可搬パッケージ
多品種部品に柔軟に対応するため、ロボット本体・テーブル・安全柵等を一体型の強固なベース構造に配置。構造解析に基づいた強度設計により、移設しても精度を維持できる構造を実現しました。天井クレーン等で容易に移動でき、設備担当者の負担を大幅に軽減しています。