研削・バリ取り・表面仕上げ用遠隔操縦ロボットシステム「Successor®-G」を販売開始
2019年12月12日
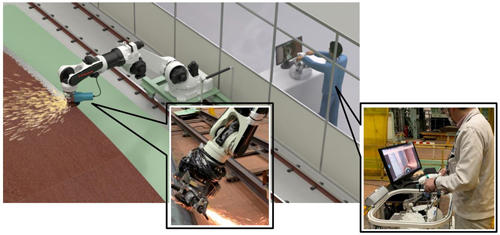
Successor®-Gを用いた研削工程
川崎重工は、溶接構造物の研削、鋳造製品のバリ取りおよび仕上げ加工に活躍する遠隔操縦型のグラインダーロボットシステム「Successor®-G」(以下、本システム)を2020年4月より販売開始します。
本システムは、当社ロボットビジネスセンターが開発した遠隔協調で熟練技術者の動きを再現するロボットシステム「Successor®」に、エネルギー・環境プラントカンパニーの大型構造物生産ノウハウと技術開発本部のソフトウエアを融合した技術シナジーによって開発されました。これにより遠隔操縦で各種作業が可能なほか、今後は作業者の動きを模倣して繰返し運転するトレース機能や、仕上げ状況を画像処理することによる自動判定運転が可能となります。さらに仕上げ状況を3D計測し、仕上げ面の凹凸を数値化することで運転データを自動生成するとともに、仕上げ状態の自動判定機能の高度化を目指します。
研削・バリ取り・表面仕上げは、保護具を着用した上で重量のあるグラインダーを保持した状態での作業が求められ、また粉塵や火花が多く発生する厳しい作業環境下において、高速で回転する刃物を扱う危険な作業です。そのため、今後人手不足が懸念されるなど、省力化・自動化・安全対策の必要性が高まっています。
一方で、研削・バリ取り・表面仕上げなどのグラインダー作業は、製品のばらつきが大きく人の技能を必要とするため、短時間での自動化には課題が多く、また手作業では技術者の技能によって出来ばえが変わるなどの問題がありました。
本システムの採用により、熟練技能者の動きを遠隔操縦でロボットが再現・自動化し、作業環境の快適化や品質の安定化が図られます。
なお、販売に先行して当社播磨工場内で既に製品への適用を進めているほか、同工場の技能教育センターにお客様の導入検討をサポートするテスト装置を設置し、実演・各種テストを実施します。また、本年12月18日~21日に開催される2019国際ロボット展(東京ビッグサイト)の当社ブースで実機の展示および遠隔操縦でのグラインダー研削作業の体験会を開催します。
当社は、国産初の産業用ロボット製造開始から現在に至るまでの50年間で培ったロボットに関する知見と、創業以来100年以上積み重ねてきた大型構造物に関する技術力を活かし、新しい産業の未来を創造していきます。
【「Successor®-G」の主な機能】
| ・ | 自動運転/遠隔操作のハイブリッド機能 作業者の動作を記憶させ繰り返し運転するロボットの自動運転(トレース機能)と、作業者による遠隔操作を自由に組み合わせることができるため、熟練技術者が必要で自動化が難しかった製造ラインの自動化が可能です。 |
||
| ・ | 仕上げ状況の自動判定運転 仕上げ状況を画像処理により自動判定することで、品質を安定させることが可能となります。(2020年度中実装予定) また、3D計測により仕上げ面の粗さを数値化することで、仕上げ品質のトレーサビリティを強化し自動判定機能の高度化を目指します。 |
![]()



