






ロボティクス
衝撃吸収や移動の安定化を助ける、4脚の柔らかな動きは、トルク制御と1msec以下の制御周期を持つコントローラによる駆動軸を同期制御することで実現する。そして、ライダーのスキルレベルに応じて、危険性を回避する自律制御の介入度合いを調整する「適応型共有制御方式」を採用する。例えば、高い崖から飛び降りるような指示は修正する一方で、高い操作スキルを持つライダーの指示には、一定程度危険性を許容する。
新感覚のインタラクティブ走行 4脚型オフロードモビリティ
新感覚のインタラクティブ走行
4脚型オフロードモビリティ
4脚型オフロードモビリティCORLEOは、ライダーの重心移動から操作意図を検知し、
安全にもスリリングにも走行可能。岩場や森林なども障害物をまたぐように走り、道なき道の先に広がる新たな景色を楽しめる。
川崎重工グループのモーターサイクル開発、ロボット開発で培った技術を結集させた、かつてない新感覚モビリティ。
4脚型オフロードモビリティCORLEOは、ライダーの重心移動から操作意図を検知し、安全にもスリリングにも走行可能。岩場や森林なども障害物をまたぐように走り、道なき道の先に広がる新たな景色を楽しめる。川崎重工グループのモーターサイクル開発、ロボット開発で培った技術を結集させた、かつてない新感覚モビリティ。

胴体中央に可動軸を設けることで、後脚部が前脚部に対して縦にスイングし、歩行時や走行時の衝撃・振動を吸収する。段差や登り坂の走行時には、ライダーが見上げる姿勢にならず、容易に進行方向の地形状況を確認できる。
150ccの発電用水素エンジンにより、4脚と胴体に搭載したアクチュエータを駆動するシリーズハイブリッド構成。「小型・軽量・高出力」の要件を満たすため、ターボチャージド2ストロークエンジンを採用している。
胴体前部には、エンジンを冷却するラジエーター、吸気を冷却するインタークーラーを効率的に配置し、エンジン温度と吸気温度をコントロール。水素燃焼時の安定性向上に寄与する。
ハンドル部分とともにライダーの重心移動を検知する。あぶみの長さはマシン側が自動的に調整し、常にライダーの最適な姿勢を補助する。
滑らかな脚の屈曲と伸長を実現。柔軟な可動域を生み出し、快適な走行や効率的な跳躍などダイナミックなアクションに貢献する。
滑りにくく、路面の凹凸を吸収するラバー素材を使用した左右二分割構造のひづめ。草原、岩場、がれ場などあらゆる地形で機体を安定させる。また、接地時の衝撃を吸収することで、脚部の衝撃吸収のための制御動作を最小限にし、消費エネルギーを抑制する。
胴体中央に可動軸を設けることで、後脚部が前脚部に対して縦にスイングし、歩行時や走行時の衝撃・振動を吸収する。段差や登り坂の走行時には、ライダーが見上げる姿勢にならず、容易に進行方向の地形状況を確認できる。
150ccの発電用水素エンジンにより、4脚と胴体に搭載したアクチュエータを駆動するシリーズハイブリッド構成。「小型・軽量・高出力」の要件を満たすため、ターボチャージド2ストロークエンジンを採用している。
胴体前部には、エンジンを冷却するラジエーター、吸気を冷却するインタークーラーを効率的に配置し、エンジン温度と吸気温度をコントロール。水素燃焼時の安定性向上に寄与する。
ハンドル部分とともにライダーの重心移動を検知する。あぶみの長さはマシン側が自動的に調整し、常にライダーの最適な姿勢を補助する。
滑らかな脚の屈曲と伸長を実現。柔軟な可動域を生み出し、快適な走行や効率的な跳躍などダイナミックなアクションに貢献する。
滑りにくく、路面の凹凸を吸収するラバー素材を使用した左右二分割構造のひづめ。草原、岩場、がれ場などあらゆる地形で機体を安定させる。また、接地時の衝撃を吸収することで、脚部の衝撃吸収のための制御動作を最小限にし、消費エネルギーを抑制する。
衝撃吸収や移動の安定化を助ける、4脚の柔らかな動きは、トルク制御と1msec以下の制御周期を持つコントローラによる駆動軸を同期制御することで実現する。そして、ライダーのスキルレベルに応じて、危険性を回避する自律制御の介入度合いを調整する「適応型共有制御方式」を採用する。例えば、高い崖から飛び降りるような指示は修正する一方で、高い操作スキルを持つライダーの指示には、一定程度危険性を許容する。
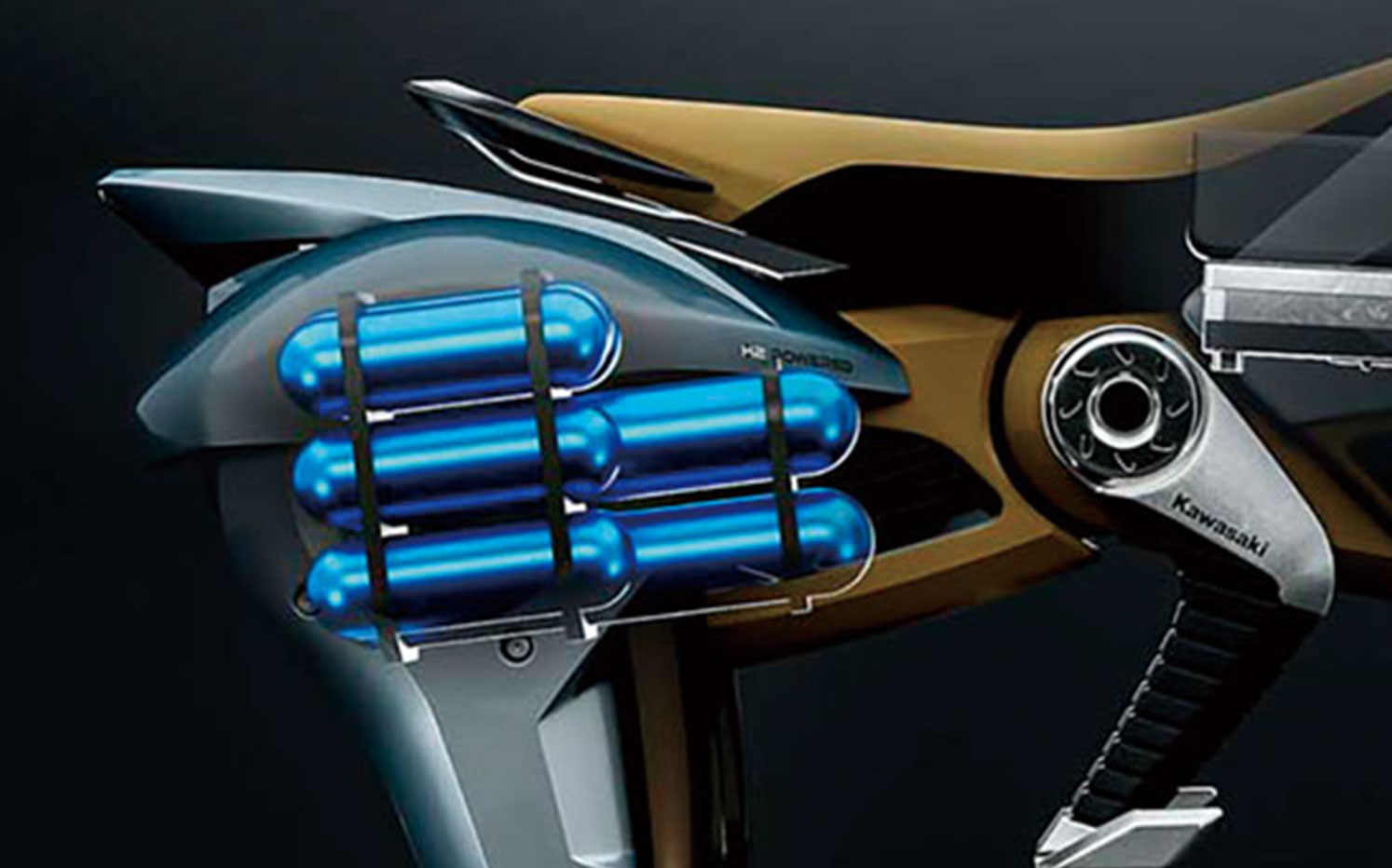
燃料貯蔵には、限られた搭載スペースでも効率的にレイアウト可能な水素吸蔵合金製キャニスターを採用。後脚部の収容スペースからエンジンに水素を供給する。また、キャニスターは容易な取り外し・交換が可能で、予備を持ち合わせればどこでも燃料補給できる。

デザインには、動物を想起させる親しみやすさと躍動感、さらにはモビリティとしての物理的な実現可能性を落とし込み、Kawasakiのモーターサイクルが培った力強さやスポーティさも踏襲。また、クレイモックを用いて神戸大学馬術部の協力によるエルゴノミクス検証を行った。CORLEOにまたがった時の安定感や走行時にライダーに干渉しないプロポーションなどを確認し、より快適なライディングポジションを造り込んだ。